Build Challengeでの
取り組みが論文のベースに
セイノー情報サービスには、「知識ベース・ロボット推進室」という部門がある。
社内に蓄積されている多種多様なノウハウを「知識ベース」として活用すると同時に、AIやロボット、RPAなどの最新テクノロジーを利用して物流業務の改善や新たなビジネスモデルを実現するのが狙いだ。
2017年4月に知識ベース推進室として発足し、2018年4月に現在の部門名に改称された。技術・開発部門から独立した戦略部署として機能する。当初は若手を中心に4名でスタートし、現在は9名へと拡充されている。
第56回 IBMユーザー論文の「最優秀賞(金賞)」および 「IBMソリューション賞」、そして第56回 IBMユーザー・シンポジウム広島大会で「プレゼンテーション賞」の3冠を「トラック輸送における積載率向上のためのシェアリングトラック構築に関する取り組み」と題する論文で獲得した原謙介氏は、この知識ベース・ロボット推進室に所属している。

原氏は2015年の入社後、ネットワーク関連の業務に従事する一方、若手を中心に部門水平型で編成された「Bluemixチーム」のメンバーとなり、AIやクラウドの研究活動に加わった。机上の研究や情報収集だけでなく、実際のプログラムやサービスの開発にも積極的に参加している。たとえば2016年6月に開催された「第3回 IBM Watson日本語版ハッカソン」では決勝戦へ進出し、Watsonとの気のきいた会話でトラックドライバーの眠気を防止する「スマート長距離運転パートナー」で特別賞を受賞するなどの成果を上げてきた。
さらに同チームを母体に発足した知識ベース推進室への異動後には、「The Watson Build Challenge for Business Partner 2017」(以下、Build Challenge)に参加している。2017年7〜10月の約4カ月で進められたこのときのプロトタイプ開発をベースに執筆されたのが、注目の論文である「トラック輸送における積載率向上のためのシェアリングトラック構築に関する取り組み〜IBM Watson(VR)とニューラルネットワークの活用による荷物と空きスペースのマッチング〜」である。
シェアリングトラックという
新しいビジネスモデル
同論文ではまず、トラック輸送業界の現状と課題を分析。なかでも深刻化する「ドライバーの不足」と「トラック積載率の低下」に焦点を当て、その解決策として「シェアリングトラック」という新たな概念を提唱している。
シェアリングトラックは、原氏らによる造語である。複数のトラック輸送事業者が本来はそれぞれのトラックで配送する荷物を、1つのトラックに積み合わせて配送する形態を指す。トラック輸送事業者の枠を超え、複数荷主の荷物を混載することで、ドライバーの不足や積載率の改善に役立てようという試みだ。
国土交通省は2016年、共同輸配送の実験的な試みとして、荷主企業20社、輸送事業者23社を対象に、マッチングシステムの試用を実施した。このシステムでは荷主とトラック輸送事業者が互いの物流情報を共有し、荷物の積み合わせが可能な組み合わせを探す。これにより、実際にペア7組が荷物の積み合わせを実現した。
試用結果は今後に向けたさまざまな可能性を示唆する一方、「積み合わせの実現できるペアを探し出すのが困難である」という運用上の問題が明らかになった。
原氏ら参加メンバーたちはこれに着想を得て、AIにより「荷物」と「トラックの空きスペース」をマッチングし、積み合わせが可能かどうかを判断できないかと考えた。この発想が、Build Challengeでの取り組みに結実したのである。
シェアリングトラックシステムの仕組みは、以下のようになる(図表1)。
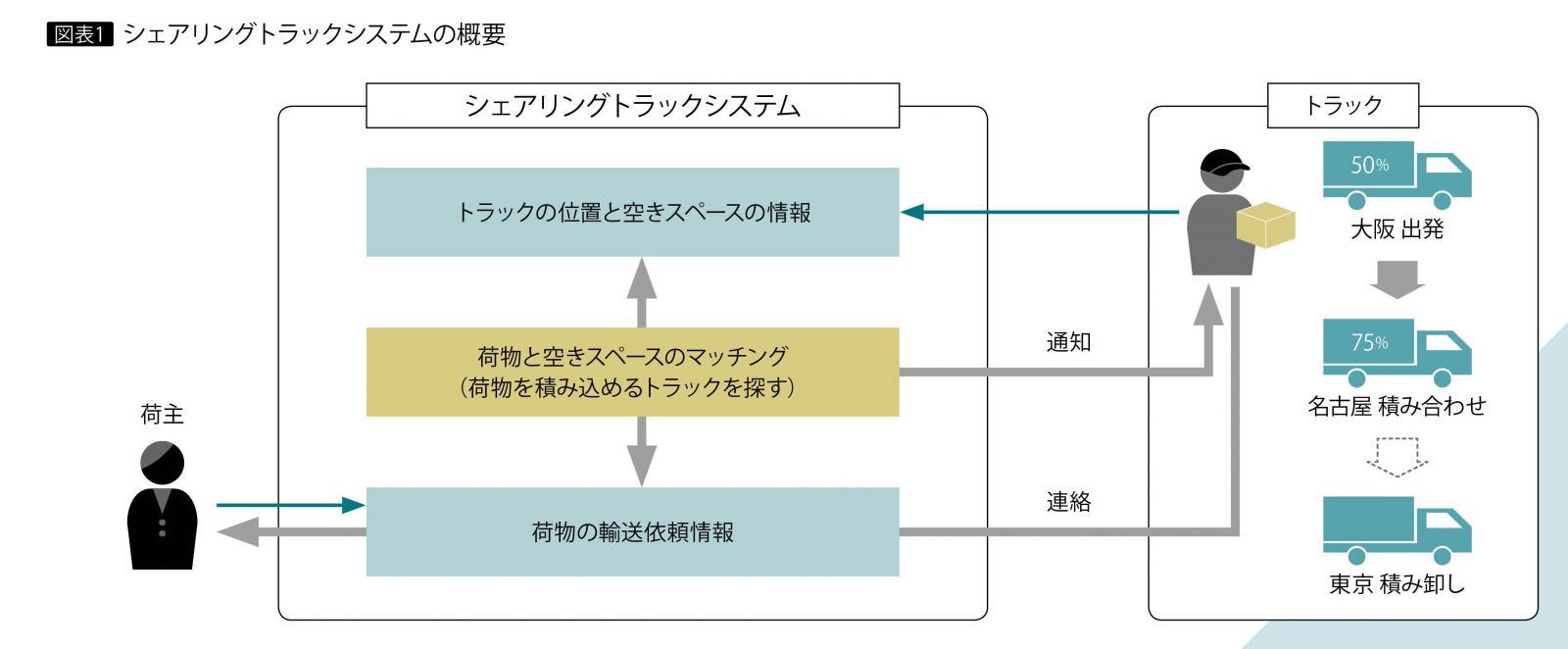
まずドライバーが荷物の積み込み、積み下ろしの際に、出発場所・時刻、到着場所、積載率をシステムに登録する。一方、荷主は輸送依頼(荷物の集荷場所、配達場所、それぞれの時刻)をシステムに登録する。
このときドライバーの業務負担を軽減するため、積載率はシステムが自動的に判断し、荷主の依頼に沿う荷物の積み込みが可能なトラックを抽出(マッチング)して、ドライバーに通知する。ドライバーはそれを受けて荷主に連絡し、輸送依頼の詳細を確認して返答する、という流れになる。
通常、荷物の積み込みが可能かどうかの判断には、以下の3点を考慮する必要がある。
(1) トラックの移動経路と時間を考慮して、新たに積み込む荷物の集荷場所、配達場所へ指定された時間に立ち寄ることが可能か。
(2)トラックの積載率から、指定された荷物を積み合わせることが可能か。
(3)新たに積み込む荷物の荷姿、重量、積載条件を考慮して積み合わせることが可能か。
今回の取り組みではシステムの複雑化を防ぐため、(3)は考慮せず、以下の要素でマッチングを実現している。
・新たに積み合わせる荷物の集荷場所、集荷時刻
・新たに積み合わせる荷物の配達場所、配達時刻
・トラックの出発場所、出発時刻
・トラックの到着場所、到着予定時刻
・トラックの積載率
Visual Recognitionと
ニューラルネットワークの利用
システムの核となるマッチングの仕組みは、2つのステップで構成されている。
最初のステップでは、IBM Watsonの画像認識用APIである「Visual Recog nition」(以下、VR)を使用。実際のトラックの荷台を撮影した画像を入力として、トラックの積載率を自動的に判定する。
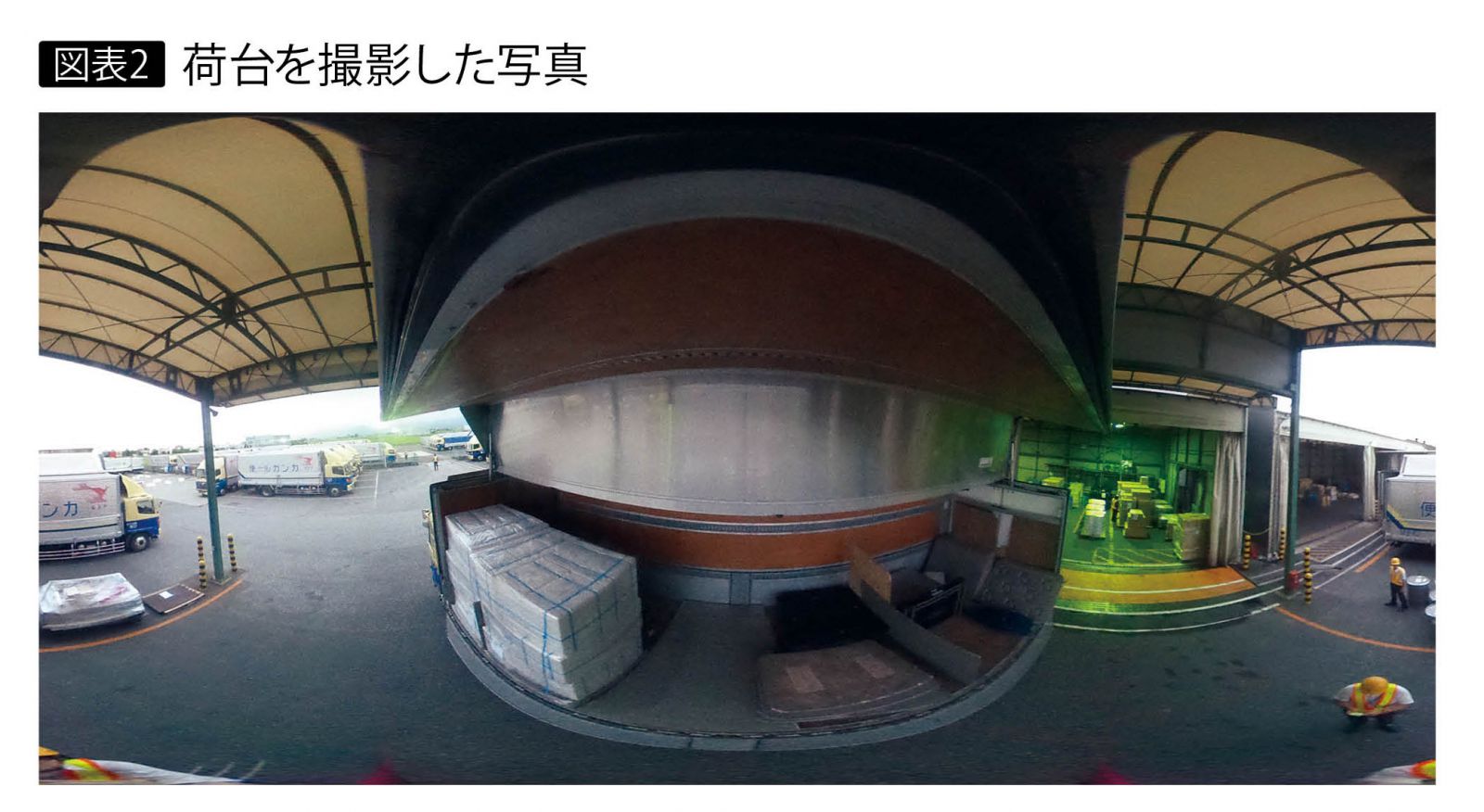
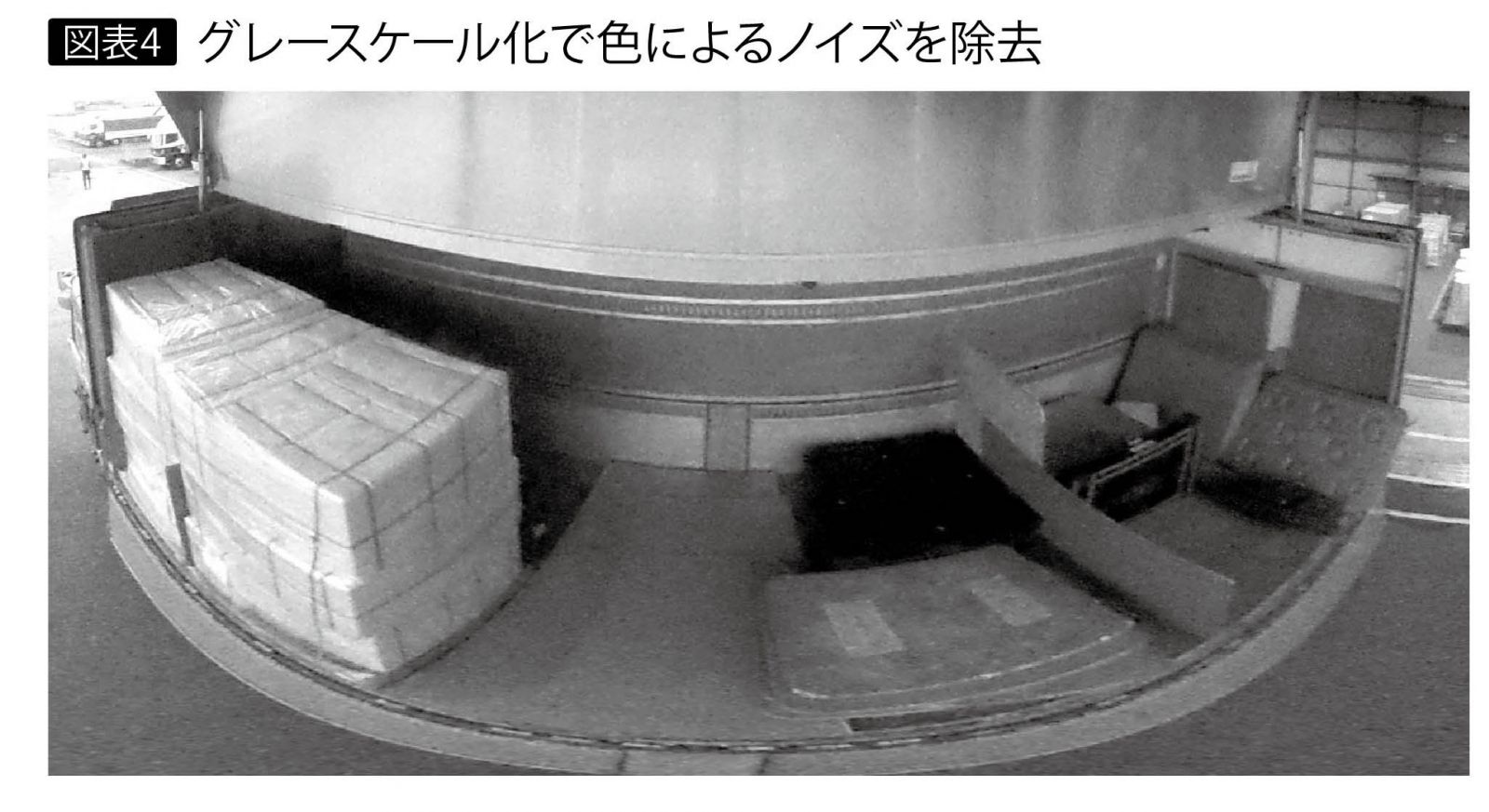
この積載率は、「25%」「50%」「75%」「100%」と4段階のクラス分類で判定する。実際にはグループ会社の協力を得て、4クラス合計で約800枚の荷台写真をVRに学習させた。この際、荷台に死角が生じて積載率の精度を劣化させないよう、360度の撮影が可能なカメラ(RICOH THETA)を使ってトラックのウィングから荷台を撮影(図表2)。さらにトリミングにより荷台外部の背景を除去したり(図表3)、グレースケール化によりノイズを除去するなどの工夫を施した(図表4)。その結果、クラス分類の判定精度を100%に到達させている。

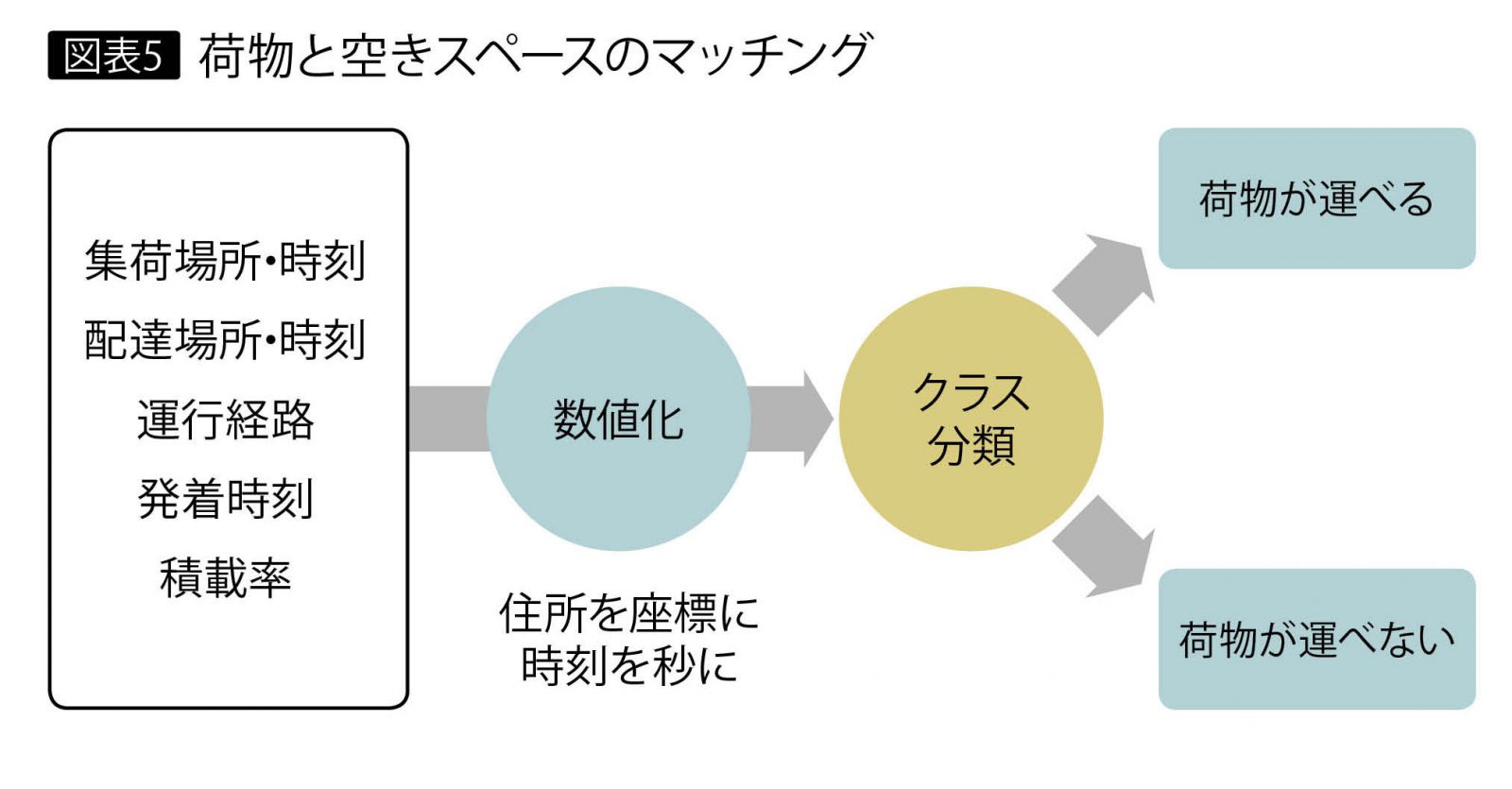
次のステップではこの積載率に、出発・到着の場所や時刻などを加えてニューラルネットワークでマッチングし、荷物の積み合わせが可能かを判定する(図表5)。
ニューラルネットワークを採用したのは、大学および大学院でテキストマイニングを専攻し、ニューラルネットワークに関する知識があった原氏の発案による。
「マッチングに必要な集荷・配達場所や時刻、運行経路、発着時刻、積載率などは、すべて数値化が可能です。たとえば住所は座標に、時刻は秒に換算する。それに積載率のデータを加えて、ニューラルネットワークにより、『荷物を運べる・運べない』のクラス分類を実行できないかと考えました」(原氏)
ニューラルネットワークのプログラム作成は、発案者である原氏がPythonを使って自ら担当した。そしてグループ会社が保有する混合貸し切り輸送の実績データ6万件を学習させた。さらに荷物の積み合わせが不可能である場合の学習データ(ネガティブデータ)を用意するため、配達場所とドライバーの移動経路が合致しないケースや、積載率が高いケースなども作成し、積み合わせ可否をどれだけ正しく判定できるかを検証している。
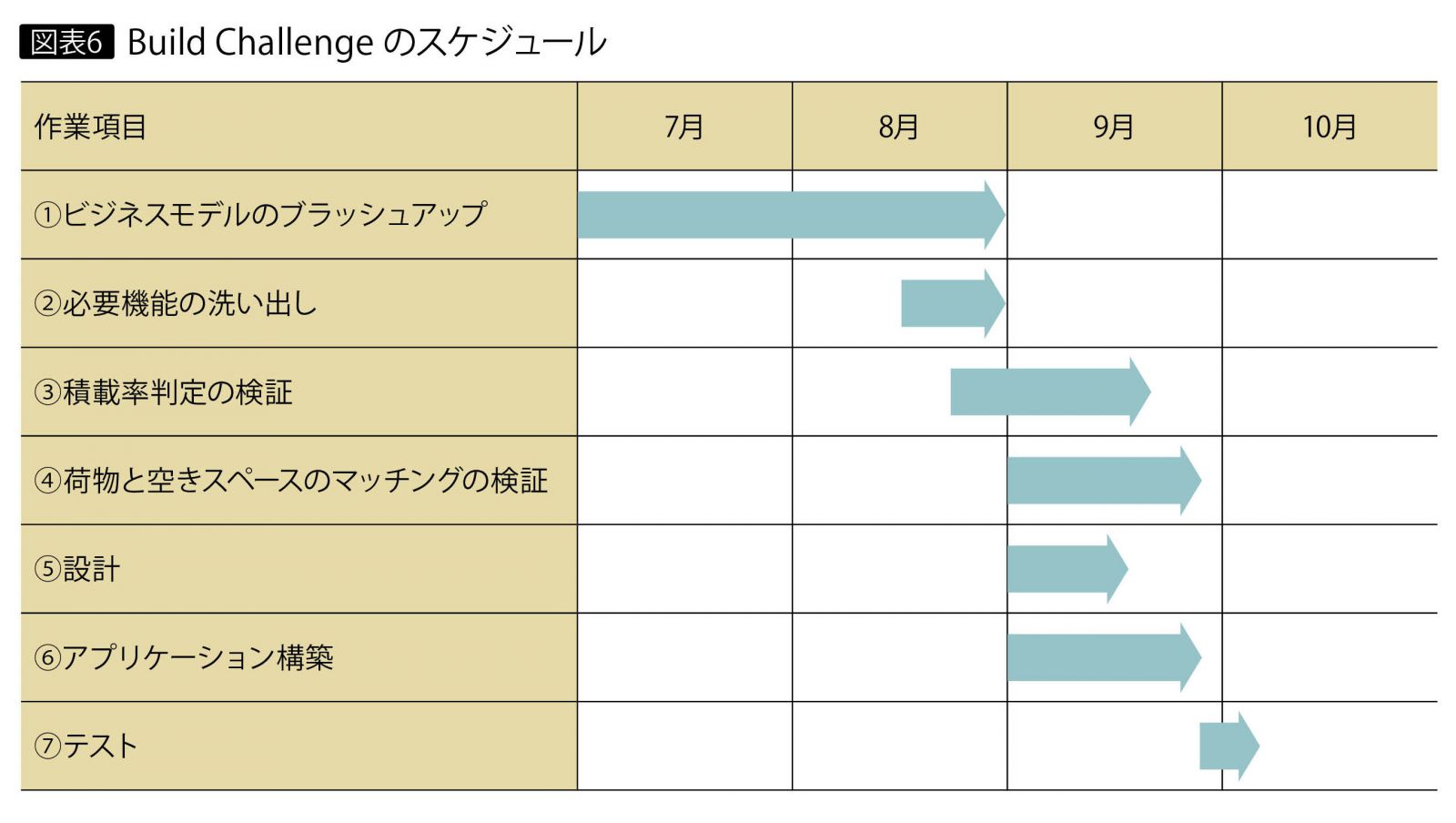
これらはBuild ChallengeのRound2のプロトタイプ作成に向けて実施された。スケジュールは、図表6のとおりである。
AIの業務利用に向けて
論文が大きな財産に
前述のような学習プロセスを経たうえで、グループ会社が保有する混合貸し切り輸送の実績データから、学習用に使用していない1000件をテストデータとして使用し、荷物が積み合わせられるかどうかの2クラス分類を実施した。
さまざまな試行錯誤を重ね、システム化の最大の難関であったニューラルネットワークにおける特徴量の正規化を実施した結果、積み合わせ可否の判定精度は78.6%との結果を得たという。
ただしこの判定精度では、ドライバーが5件に1件の割合で、積み合わせが不可能な輸送依頼を受け取ることを意味する。また実際のマッチングシステムには位置情報や時刻情報、積載率のデータ以外にも、荷物の重量や荷姿、トラックのサイズ、積載重量、中継地などの要素が必要となる。さらに実現に向けては荷主やトラック輸送事業者、ドライバーを含めた業界全体の取り組みが欠かせない。
そのため論文では、現時点ではまだシェアリングトラックシステムの実用化にはいくつかのハードルをクリアする必要があると結論づけている。しかし原氏は今回の取り組みで得た成果は大きいと、次のように語る。
「VRやニューラルネットワークを実際に体験できた点も大きな成果でしたが、新しいビジネスモデルやサービスの実現に向けて検討を重ねた時間が、何より貴重であったと感じています。プロトタイプ作成の4カ月間で最も時間を費やしたのは、ビジネスモデルのブラッシュアップでした。トラック輸送業界の課題を調査し、輸送業務に精通する他部門のベテランメンバーを交えながら、シェアリングトラックという新しいビジネスモデルの要件や問題点をつぶさに検討した今回の経験は、今後、AIなど新しいテクノロジーを業務に役立てていくうえで、何を考えるべきかの方向性を示唆するものとなりました」(原氏)
この経験を糧に、知識ベース・ロボット推進室は最新テクノロジーによる業務システムやサービスの企画をさまざまな形で進めているようだ。
[IS magazine No.20(2018年7月)掲載]







